

Back in January 2025 I was about to start my final year project. This was a 12 week project that would punctuate my 3 year Robotics and Mechatronics Undergraduate degree at Middlesex University. It was a very important project and naturally I felt very nervous.
Little did I know that the project I would undertake would take me on a 3 month journey alongside another 3 month unforgetable epilogue (subtle foreshadowing for part 2).
This is the story of how it all came together.


Aaand that’s how initial 12 week journey was kicked off. A lot happened during those weeks and honestly; If you want all the week by week in depth videos, check out my submission blog, presentation, github repo and report I linked on top of this blogpost.
For the remainder of this blog I’ll cover a few project highlights and easter eggs. I’ll then finish off with the platform showcase and final 10 minute presentation I did for my final course day.
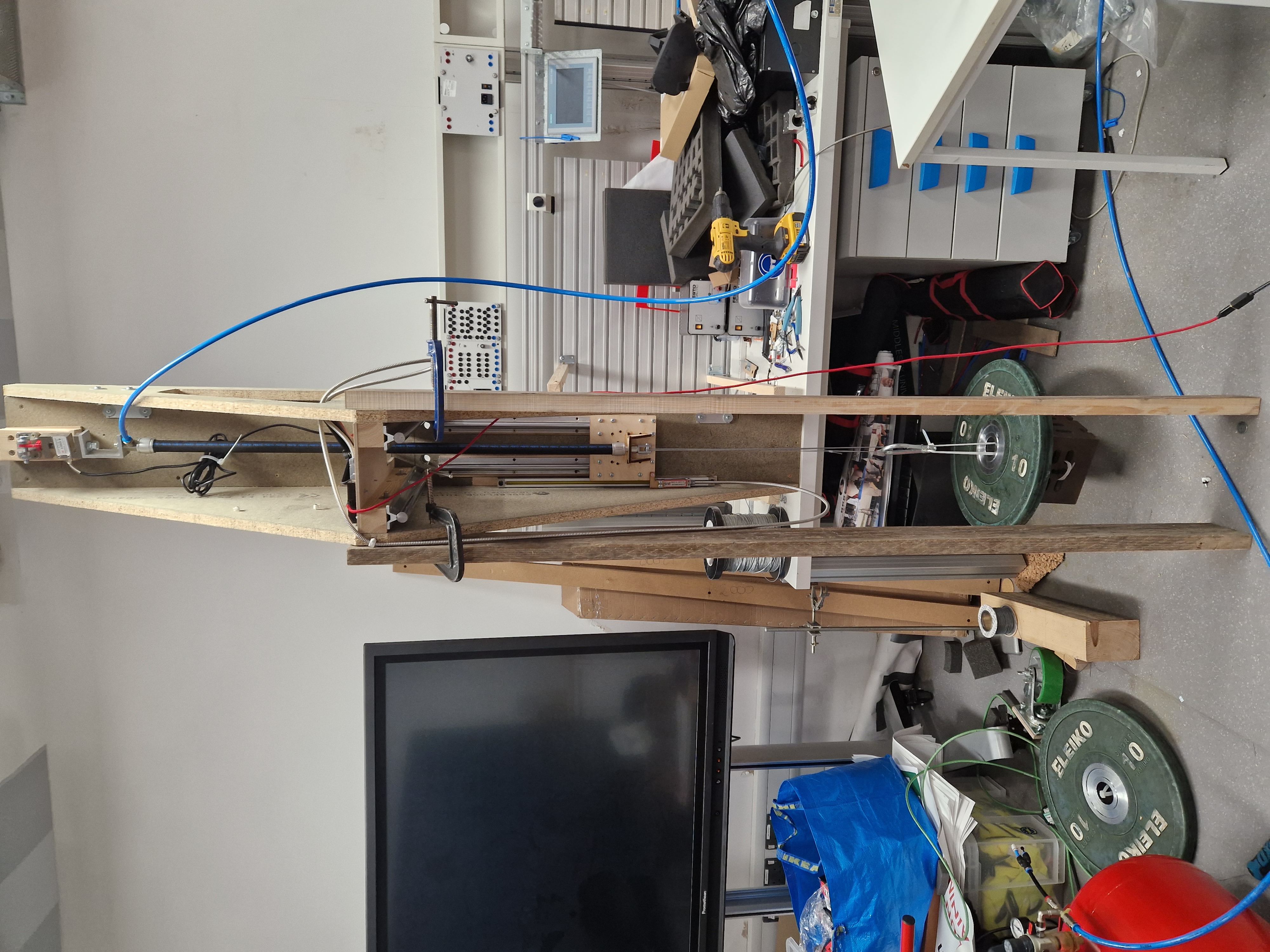
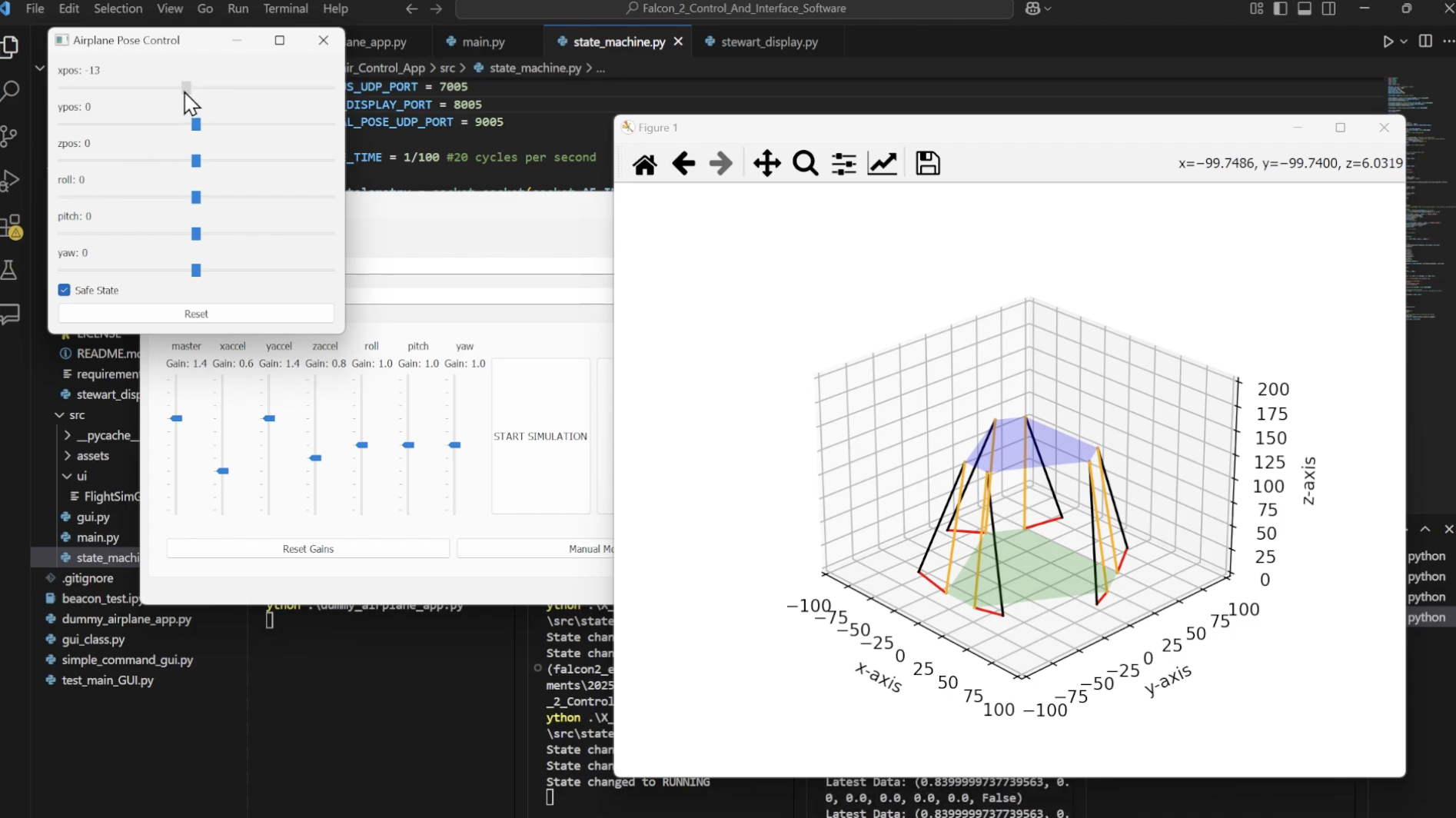
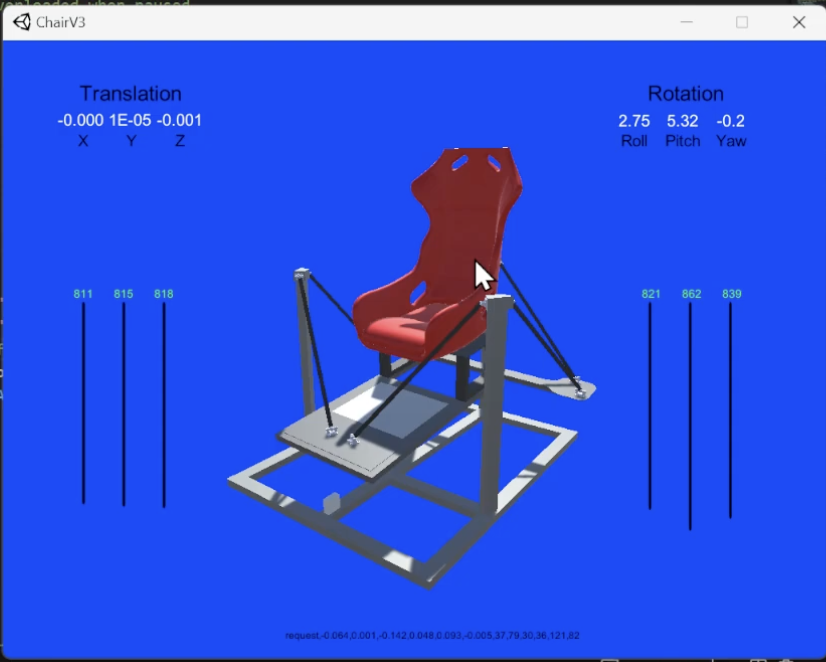



And so that’s the rough highlights. I’ll now present you with a video of me showing the platform in action and the video of my final project presentation.
Enjoy.
After the presentation, after months of hard work, I achieved 88% on my final year project—the highest in the engineering department of my university.
This earned me eligibility for the IED Excellence Award, presented to the best final year project by the Institute of Design Engineering. I’ll share more about that in a separate post.
Overall, it was a challenging and rewarding experience, and one I’ll always look back on with pride.